 大家电
大家电  厨卫家电
厨卫家电  健康电器
健康电器  数码产品
数码产品  电脑
电脑  五金电器
五金电器  生活用品
生活用品  网站首页
网站首页[扫地机器人]2018双十一扫地机器人选购攻略
认证:生活电器优质原创作者
本文有6078个文字,大小约为27KB,预计阅读时间16分钟
精选评测好文

前言
写了一篇iRobot与米家扫地机器人的对比评测。评论里有说我是水军的……
实则不然。我本来是想换石头的。看了一圈扫地机器人之后并没发现石头有多突出。想尝试下iRobot。虽然当时了解的各种评测也都是偏向小米的。实用性和性价比上米家和石头毋庸置疑。
抱着试一试的态度下了个单(毕竟天猫7天无理由。也够我写完评测了 )。起初的想法写个小米完虐iRobot的评测来拓展下评测技能。但实测结果让我一改对小米的看法。。。(怪我不小心入的9系 8系以前可能在规划上没什么悬念会败 )
软文什么的我就不争论了。你们也可以试试。毕竟天猫七天无理由骗不了你。不行可以退货 。
( 至于为什么会明显偏向iRobot……我是真的被iRobot折服了……为了显得有内容所以强行写了很多……)
评论里争来争去。为什么争论这么大。主要还是需求不同。觉得这个价不值的占多数。最后关键点还是在性价比上。也有不少跟风起势的。而我这些天又详细看了不少评测和多款不同品牌的扫地机器人。在这里分享下新的认识。也顺便给个选购攻略。
(我从不认输。看完这篇其实你会觉得小米/2018双十一扫地机器人选购攻略石头也就那样。业界一般般的水平。轻松被超越 )
扫地机器人的购买需求
性价比是按照需求来的。
买之前还需要确定自己的需求才能找到最合适。最具性价比的扫地机器人。
比如一个单身的用户。房子空空荡荡。家具整整齐齐。可能一天在家的时间就只有晚上。地板脏不到哪去。清扫场景简单。那清扫起来划线就行了。(光扫个地就行像米家就够了)
但是一个家庭就不一样了。按人口数量以及年龄层次的不同。需求也不一样。小两口的家庭并没有比单身家庭多很多杂物。也是顶多每周多扫一两次。(扫拖一体)
家有学龄前儿童和在家带娃的老人的就会有扫地机器人工作时家中有人的问题。椅子板凳会变动位置。地上玩具会影响清扫。反过来扫地机器人也会影响家人。(高端旗舰有防缠绕脱困功能)
老年退休父母的家庭又不一样。在家时间长。喜欢清静。对噪音有要求。也不喜欢用手机操控的。会嫌麻烦。(拖地机器人)
举个实例:
例如我。我一个人单身时候的清扫环境。米家扫地机器人完全够用。一周哪怕只清洁一次都够。而且清扫的时候我也不在家。完全没有对我产生任何干扰。
连茶几电视柜都没有的环境。这样的规整的场地是米家扫地机器人发挥的好空间。不但效率高而且全覆盖。我对小米黑转粉的产品就是这款扫地机器人(看着这清扫路线就舒服)。
但是随着宝宝出生。为了更方便带孩子。我跑回了父母家住。情况就变得很糟糕了。
为了给宝宝创造一个干净的玩耍环境(家里有伏地魔和破坏王的都懂 )。必须经常扫。扫地机器人的工作间隔有大部分时间需要每天扫一次。也有出2018双十一扫地机器人选购攻略门溜娃的间隙抓紧时间清扫一遍的时候(大部分时间来不及收拾房间)。
这是寥寥无几的成功完整地图。清扫前清理了一个小时的杂物才得到这个清扫最全的地图。
实际上这两套房子面积是一样的。但老房子地面状况复杂很多(可以看出来老房子的清扫面积实际上非常小)。不像我之前的房子全房都能覆盖无需虚拟墙。父母的老房子里全是各种各样的陷阱。更别提还有个喜欢往地上丢玩具的宝宝了。
常态是:不是掉下悬崖就是被卡在半空。还对着电风扇的圆形底盘、家庭影院落地音箱圆形底盘之类的不断的绕圈撞。不断地在推拉2018双十一扫地机器人选购攻略门导轨上转来转去(可能是底面不平的影响)。恼人的是这样不愉快的声音。
米家扫地机器人会在一些没有扫描到障碍物但是实际上有障碍物的地方(障碍物低于头顶的激光传感器的时候)不断地尝试着覆盖。这个过程也显得非常的蠢。外出时间不看的时候不觉得。但当你看到的时候会特别的烦。没人忍受得了一个智障在眼前耍宝。
黄色直线为虚拟墙
为了让机器人完成工作。我买了三卷虚拟墙(黄色直线为虚拟墙)。把该贴的地方都贴了。但是还是经常出错。虚拟墙也并不能万无一失。重新移动之后又会重新全房清扫一遍。结果更多的时候是一自动启动就被父母关了。此时更像个累赘。也引来长辈们的吐槽。说浪费钱买个没用的东西。扫不了多少地方。还特别吵(吵主要是在滑轨和电风扇圆盘底座上的问题)。吩咐我以后别开了。不如自己扫。
显然这根本达不到解放双手的目的。我一直在给别人安利的的米家扫地机器人此时成了人工智障一样的摆设。打了我自己的脸。扫地机器人没变。变的是清扫场地。
这也让我意识到扫地机器人并非只要个扫地就行。各方面都要符合需求才是一款合适的扫地机器人。
就像清洁一个篮球场。空旷的场地弓字形就够了。但是清洁同样面积的一间有桌椅板凳的教室的话。路径规划复杂得多。时间也消耗的多得多。同样面积的教室有人和没有人的情况也是不一样的。空荡荡的只有桌椅板凳的教室与有各种杂物的教室也是不一样的。虽然清扫面积在减少。但是清扫难度逐级上升。被困概率也越来越高。
所以购买前看看自己的“场地”。按场地的需求来购买才是合适的选择。
面对复杂的地面情况如何规划。面对有人活动的情况如何应对。面对被杂物缠绕如何脱困。清扫上的洁净程度。这些对应的各种“场地”的要求都是选购上的需求。
扫地机器人的几种导航方式对比(无线载波定位、vSLAM图像位移定位、RPS激光定位)
如何规划的问题首先得看如何导航的。 对于规划式扫地机来说。能够做到定位是最基本的要求。也就是说要随时知道自己在什么地方。除此之外还要知道哪里已经清扫、哪里还没有清扫。没有精准的定位后续的规划清扫也就无从谈起。
扫地机器人是如何导航的?
随机导航式的现在很少了。目前主流的是下面三大系统:
无线载波定位、vSLAM图像位移定位、RPS激光定位。
这三种导航技术经过多年的发展都足够好。足够支持全屋清扫。这样的导航系统的选用决定了机器人是怎样“看”世界的。
无线载波定位
无线载波室内定位系统是通过充电座和机器无线载波探头。双重测量距离变化定位坐标。抗干扰能力强。具有极高精确度。室内定位误差可以控制在1cm以内。对室内环境进行精准的定位坐标构图。代表是浦桑尼克。
无线载波定位下 机器人“看”到的是坐标点。
机器人得到的信息是坐标点。但需要达到最佳路线规划效果一般都要加上辅助的传感器来实现精准导航。像陀螺仪与HSIR+(混合矩阵红外)多点矩阵才能有效的进行地图规划。
但是缺点也很明显。由于需要充电座作为基准。虽然小户型是完全没有问题的精度还非常高。但是一到大户型。多房间的情况下就没那么精准可靠了。
vSLAM图像位移定位
灰度视图
VSLAM(Visual SLAM)是一种机器视觉导航定位系统。相比能够直接获取方向和距离数据的激光SLAM技术。VSLAM获取的是灰度或彩色图案。对于障碍点只能获取方向而无法直接测量距离。要想计算该点的距离。需要相机挪动一个位置再观察一次。按照三角原理进行推算。
vSLAM。全称叫做visual Simultaneous Localization and Mapping。中文叫做视觉同时定位与建图。其含义是即时定位与地图构建。指的是机器人在自身位置不确定的条件下。在完全未知环境中创建地图。同时利用地图进行自主定位和导航。SLAM问题可以描述为:机器人在未知环境中从一个未知位置开始移动。在移动过程中根据位置估计和传感器数据进行自身定位。同时建造增量式地图。
SLAM理论就不深究了。研究时间三十多年(从上世纪90年代开始的)。也是足够的有效。代表产品有iRobot 9系。戴森360 eye。
彩色视图
vSLAM导航“看”到的是真实的世界。
采用vSLAM导航的基本属于高端产品。价格上也贵出很多。像上面的Dyson 360 Eye的顶部有一个360度全景摄像头。相当于扫地机有了“眼睛”。它能够以30帧/秒拍摄出周围环境的照片。从而帮助扫地机认清周围环境的一些关键特征。根据这些关键特征对机器人的方位进行持续的三角定位。配合同步定位与地图创建软件(SLAM)技术。它可以随时知道哪里已经清扫。哪里还没有清扫。
缺点是:定位过程中需要通过比对参照物的特征信息来确定位置。因此参照物的特征信息、环境光源、机器人硬件条件这三大因素会对精确度产生影响。导致定位精度的稳定性不够。
RPS激光定位(现在是LDS)
RPS激光定位系统。通过360°不断旋转的激光探头。测量扫地机器人与环境距离变化经来实现定位。这种定位系统定位准确。但因探头价格昂贵。而且工作时需要不停地旋转。2018双十一扫地机器人选购攻略寿命很有限。购买后续维护成本高。使用这种定位技术的品牌有美国Neato、米家扫地机器人及科沃斯的部分产品。
顶部的激光测距传感器可以根据激光从发出到接收的时间来计算与前方障碍物的距离。在扫地过程中它会不断旋转。测量周围环境距离的变化来定位坐标。同时利用激光雷达采集的数据绘制房间地图。根据它规划处最佳路径。实现规划清扫。
RPS激光定位“看”到的世界是二维的点和线。
这种定位系统有个硬伤。就是无法探测到落地窗、落地镜、花瓶等高反射率物体。因为激光打到这类物体上无法接收散射光;另外。为了保证获得全新数据。360°旋转激光探头必须一直旋转。结果就是会缩短产品寿命。
也有像浦桑尼克 LDS M6这样的双重定位的产品。结合起来有更高的精度。
三种方式获取的环境信息大不相同。无线载波的坐标点、vSLAM的灰度/彩色图、RPS的二维点线图。
从导航传感器上获得数据量上很容易看出vSLAM获取的信息更多。信息量也更大。
实际上vSLAM是目前在机器人行业应用与研究的主要方向。像Xbox上的体感kinect也是vSLAM的一种可以通过双摄像头的图像感知物体以及距离深度等信息的技术。是让机器人更全面的认知世界方式。现在除了iRobot 和Dyson 其他各家也都在往vSLAM上发展。可以说也是扫地机器人的未来发展趋势。
搭载的芯片也决定了扫地机器人的智商。强大的芯片自然会在功能上也有不错的表现。目前最新的技术已经发展到了算是第四代。融入AI的AI+图像识别+vSLAM芯片。不过暂无产品面世。
(可以展望一下。可能明年就可以看到下一代扫地机器人。有了AI加持和图像识别之后。可以语音控制像“来把客厅扫一下”“把餐桌底下扫一下”这样的语音控制。美好的智能时代~ )
(看着看着就……变成选手机一样的看处理器了 )
核心工艺。双核/四核。GPU。AI支持……芯片决定了智商。因为这是一个扫地机器人思考的大脑。
不过看到的大部分国产扫地机器人都是用的像ARM Cortex-A7这样的处理器。上图为米家扫地机器人的三颗芯片。石头也为同样的三芯片配置。
大存储也是个判断点。机器人的“记忆”以及算法和后期提升空间都多多少少会依靠这样的硬件支持。
所以还是我这篇文章里的争论。就像你不会去指望一款骁龙660会有像骁龙845一样的性能。也不会指望他有AI核心一样。实际价值上iRobot和Dyson的高价也有成本的因素。配置上确实属于强大的旗舰机的范畴。但普通用户并不会在意这么多。毕竟外观都差不多。功能也差不多。小米的白色外观还更讨巧一些。
类似的情况也像OPPO和vivo这样的手机厂商的策略。在核心不够强的情况下其他方面可以差异化竞争。例如人性化。可视化。划区域清扫APP虚拟墙之类的性价比路线也不失为一种竞争策略。
其实说起来智能时代下各种智能家电都应该看看芯片是什么样的水平。这代表了最高能达到的高度。不过我看了不下30款扫地机器人。在宣传页面标注了芯片型号的不多。
实际上每家使用的芯片品牌也各不相同。看来扫地机器人这个市场的不透明度很高(坑深)。消费者能获取的信息极其有限。大部分是看的广告词和评测文章来做决定。
这里也只能从三种导航模式来大致判断处理器的高低了。
扫地机器人的“软实力”(要到哪儿去?2018双十一扫地机器人选购攻略怎么去?)
既然都把扫地机器人比作手机了。那自然每个厂商都有自己的UI(扫地机器人的行为模式)。这也是一大卖点。
人类世界有一个衍生自西方的哲学问题:我是谁。从哪儿来。到哪儿去。
对于机器人来说。这个问题变成了:我在哪儿?要到哪儿去?2018双十一扫地机器人选购攻略怎么去?
翻译成机器语言便是:地理环境感知、路径规划决策、运动部件执行。
导航系统给了地图解决了“我在哪儿?”的问题。“要到哪去?”“2018双十一扫地机器人选购攻略怎么去?”这是接下来的问题。
路径规划系统
一般来说。扫地机需要这么几个规划能力:贴边打扫、折返的弓字形清扫以及没电时候自主充电。除此之外还需要有额外的规划算法。比如针对折返的弓字形清扫。有很多问题要处理。扫地机如何最有效进行清扫而不重复清扫?如何让扫地机和人一样。理解房间、2018双十一扫地机器人选购攻略门、走廊这种概念。
下面分品牌看看各家的规划系统。
浦桑尼克的iPNAS四段式清洁系统
以浦桑尼克的iPNAS四段式规划清洁系统来说。有四个相辅相成的阶段:定位-构图-规划-清扫。其原理为扫地机器人利用导航定位系统获取自身位置信息。利用传感器构建环境地图。再由快速运算的电脑芯片实时规划清扫线路。最后利用陀螺仪校正扫地机器人清扫路线不跑偏。导航系统的点阵定位加上各类传感器的辅助。可以很好的实现路线规划。
实际上导航解决的是大范围移动过程中的误差。小范围上的规划则更多的是依靠各类传感器。浦桑尼克的解决方案实际上有各种各样的传感器探测模式。像超声波+红外探测的双重侦测模式。除了无线载波也有激光导航的组合。2018双十一扫地机器人选购攻略看来还正处于探索阶段。
iRobot的iAdapt2.0智能化清扫技术
iRobot的iAdapt智能化清扫技术的专利技术。这是一种软、硬件相结合的智能化AI清扫系统。硬件由Roomba前方的若干红外探测器、底部灰尘侦测器和落差传感器、毛刷胶刷边刷测速系统等等组成。通过Roomba的硬件传回的信息。iRobot自身的软件可以对回传信息进行分析。根据红外回传信息的强度、范围、高度、转速、电流大小、阻力等参数。计算出前方障碍物大致形状。再经过软件的处理运算。得出的结果就是Roomba下一步清洁方式。Roomba以每秒60次的速度计算周边障碍物的情况。同时根据所处环境作出40余种清扫动作。如围绕、折返、螺旋、贴边、转身等等。
同样是碰撞的方式。iRobot的一直使用的碰撞规划系统更为复杂。但也足够有效。不过在大面积清扫时的效率不高。经过多年的打磨。9系加入了vSLAM视觉导航之后升级到了iAdapt2.0。加入vSLAM视觉导航之后在大面积清扫的情况下也能游刃有余了。
对于iRobot而言。vSLAM导航的加入更多的是解决了大面积清扫时的定位问题。本质上的规划模式还是之前几个系列一直在用的Wheel Odometry(轮胎里程计)。Optical Float Sensor(光学移动传感器)来进行规划的。规划的同时也处理了脱困等各类问题。效率上算是非常高的一种规划了。
Dyson 360 Eye 的规划系统
Dyson 360 Eye智能吸尘机器人采用的360°全视角智能导航技术。由SLAM技术+实时摄像头+全景镜头组成。2018双十一扫地机器人选购攻略根据几何和三角法则绘制出房间地图和做出导航。用户不需要刻意告诉它需要到哪里清扫。它也能够准确地定位自己在清洁环境中的位置。以及能清晰判断已清扫地扫和未清扫地方。保证机器不重复清扫。SLAM规划性清扫路径。2018双十一扫地机器人选购攻略根据环境的临时变化而及时的做出调整。
与同为vSLAM导航的iRobot不同。Dyson完全是依靠摄像头来进行定位于规划的。单独的vSLAM并不完美。在摄像头位置上也可以看出来。由于具有一定的高度。地面状况并不能很好的察觉。看过许多评测。在“智商”方面的表现并不理想。容易卡死在各种狭小的角落。低于机身的障碍也是非常大的干扰。
neato的自动驾驶算法
Neato扫地机器人D7 采用了neato专利的Lasersmart 激光雷达 + 独有的自动驾驶路线规划算法 。就像无人车一样。在工作时会生成一张 “ 数字地图” 。不断标记出房间与家具的位置。自动计算路线。清洁每个房间。并避开各种障碍。
看了官方资料以及几篇评测。并未发现对这样的“自动驾驶算法”的详细解读。只有这样的描述:在即时导航规划中。自动驾驶车会探测障碍物。并对障碍物的移动轨迹跟踪做出下一步可能位置的推算。最终绘制出一幅包含现存碰撞风险和潜在碰撞风险的障碍物地图。
以在硅谷做自动驾驶技术起家的Neato也将自己的成果应用在了扫地机器人上。普遍的评价是好用。效率高。碰撞少。这大概是效率最高的激光导航扫地机器人了。
科沃斯的Smart Navi2.0
SmartNavi全局规划系统通过LDS技术和SLAM算法。帮助扫地机器人识别工作环境并进行规划清扫。以家庭环境为例。SmartNavi全局规划系统能使扫地机器人先对室内进行360°的全方位扫描。识别房间环境和家具的位置。如果借助手机APP。扫地机器人还能将扫描结果(即客厅、卧室、阳台、冰箱、沙发等区域的分布)反馈在手机的APP端。建立出一张可以让用户看到电子地图。而用户通过APP。不仅能够看到扫地机器人的即时工作轨迹。还能实现指挥它“到指定区域清扫”的交互体验。
第一次使用进行清洁的时候它会边清洁边建图。清扫结束后。地图即可保存下来以便下一次的清洁。保存地图这样的功能为划区清扫以及APP指定虚拟墙提供了基础。在用户体验上也有不小的提升。
石头扫地拖地机器人 的 地图管理2.0
类似科沃斯的导航功能。首先是头顶的 LSD 激光传感器实时扫描家里的地图。接着由 SLAM 算法来做实时定位和地图绘制。也可以保存地图。支持划区清扫以及软件虚拟墙。
同为激光导航Neato、科沃斯、石头三个厂家在导航系统以及路径规划都类似。但扫地机器人行为上的存在较大的差别。科沃斯和石头的“智商”达不到Neato的高度。抛开硬件配置。一套有效的规避以及全房覆盖的算法带来的用户体验的提升更加明显。含金量也更高。
总结起来。路径规划上就分为有自家一脉相承的算法的与普通的弓字规划的两种。目前路径规划算法上走在前面的是iRobot和Neato以及浦桑尼克。相较前两家后者还在打磨阶段。其他品牌科沃斯已经有了雏形。其他厂家像石头、戴森、以及一众国产厂家都是起步阶段。还没形成自己的比较系统的算法。
所以很容易可以预见到的是iRobot和Neato在面对复杂情况时会有不错的应对。多年的技术积累不是一下就能超越的。这样拼“硬智商”的项目毫无疑问有经验的算法打磨得更精细更到位。
像iRobot2018双十一扫地机器人选购攻略可以自动根据清扫面积以及清扫频次和地面的污垢多少程度选择清洁模式。清洁模式上分延边清扫。单次清扫和多次清扫。除了弓字覆盖加延边清扫还能根据需要进行井字覆盖。这一切用一个自动模式就可以让机器人自动选择。这样的智能程度是我做完对比测试之后印象非常深刻的。这也是我上篇对比测试里这么膜iRobot的原因。
而Neato的基于汽车自动驾驶路线规划算法核心必然是减少碰撞。这与iRobot完全不同。iRobot说起来还是碰撞式规划起家的。即使9系vSLAM导航下的规划也是主要依靠积累起来的碰撞算法。即使没有vSLAM导航也能在小区域比较好的覆盖(见上篇iRobot的“睁眼”“蒙眼”对比测试)。而Neato的规划看过多个评测之后明显的是碰撞现象比各家的都少很多。像“绕桌腿”“2018双十一扫地机器人选购攻略沿墙”“减速规避移动物体”这样的行为都更像在小心翼翼的驾驶汽车。
防跌落/防缠绕能力
看完“要到哪儿去?”和“2018双十一扫地机器人选购攻略怎么去?”之后就有了“路上被困怎么办?”这样的问题了。
我在对比测试的时候发现防跌落/防缠绕能力也是影响机器人效率的另一大因素。对于扫地机器人而言一旦跌落或者被缠绕本次清扫就基本上失败了。
防跌落
首先是防跌落。到目前为止各家都做得不错。对悬崖的探测上没有非常差的。但都存在小概率的掉下悬崖的情况。
主要掉下去的情况多发生于直角的墙角于台阶交界的地方。大部分扫地机器人的悬崖传感器位于前半部分。但是扫地机器人碰撞墙角退回的过程中容易背对悬崖。掉一个轮子或者整个掉下去。据我米家扫地机器人的使用经验来看。总是会在同样的地方犯同样的错误。不得不用虚拟墙隔开。
防跌落上自然是传感器越多。覆盖面越广掉落的几率越少。不过也与算法有关。某一款会在某个特定的地方掉落。但其他家的并不会在同一个地方掉落。路径规划的算法不够完善也会导致经常掉落。
防缠绕
另一个让机器人挂掉的情况是被缠绕。
下面是我的两台扫地机器人的防缠绕测试。
缠绕障碍测试-Roomba970
缠绕障碍测试-米家
绞杀扫地机器人的往往是一根数据线/耳机线/鞋带/一只袜子/这样的软质长形物体。这是在家里常见的地面陷阱。
像那种横着跨越硬质电线的测试太片面(绷直了。两头还固定住。不知道这有什么测的……)。实际上没有几款扫地机器人会被这样的障碍物缠住。直接跨过去在我眼里不算防缠绕。被软绳缠住才是常态。
各种主刷、边刷、甚至驱动轮被缠住的故障(对不起了。又是米家……我不是故意黑的。这是常态…… )
结果很明显。其实像米家这样的没有防缠绕功能的扫地机器人占大部分。但凡宣传页面没有这项的。都不可能有这样的功能。
这是iRobot的双胶刷防缠绕设计。这是在探测到吸入受阻后翻转吐出杂物的演示。除此之外边刷也能在受阻时翻转防缠绕。不管是宣传还是实测都有不错的表现。
这里有一篇各种障碍的通过性及防缠绕测试的文章。除了iRobot 其他都不太乐观。
另外就只有浦桑尼克的几款在商品介绍页面提到了防缠绕功能。但只是在受阻时降低主刷边刷的转速。一来保护电机。二来好通过障碍区域。但实际表现并不太好。
以上部分可以说是扫地机器人的硬实力了。导航系统、规划系统、自救能力。决定了一款扫地机器人的核心功能上的完善程度。
比较突出的是算法是iRobot iAdapt2.0 以及Neato的自动驾驶算法属于比较成熟的算法。工作时各种环境下卡死的情况非常少。iRobot则还有防缠绕这样的脱困模式。功力上更胜一筹。在市场上也是鹤立鸡群般的存在。
但如果不是使用环境特别糟糕的话。一般用户也没必要追求iRobot这样的产品。毕竟目前iRobot的Roomba产品线只有清扫功能。现在的扫拖一体机更符合大多数家庭的需求。也更主流。
扫地机器人的清洁方式(扫地、拖地)
导航盒路径规划代表了清扫效率。而主刷边刷以及拖地代表了清扫的干净程度。
扫地功能
扫地功能的设计上基本是边刷+主刷+吸尘的设计。
边刷设计
边刷在扫地机器人的边缘。一般超出机体5-8公分。能有效清扫角落里的灰尘。有双边刷与单边刷的不同设计思路。
采用这种设计的扫地机器人产品的边刷系统一般都在右侧。边刷最长端一般超过机身边缘3-5cm不等。采用单边刷的扫地机器人产品。一般底部均有滚刷设计。所以它们的单侧边刷的主要作用是2018双十一扫地机器人选购攻略沿墙清扫模式时进行贴墙清扫。而地表的的清扫工作主要由底部滚刷来完成。这种设计的优点显而易见。因为扫地机器人永远只可能有一个边需要贴墙清扫。所以它比双边刷设计更省电
使用双边刷的扫地机器人为了得到较好的清扫效果必须使用双边刷以强化清洁效果。相当于使用了部分电力来换取更高的清洁度。所以这种设计的优点也比较明显。即在牺牲一部分续航能力的前提下。提高了边刷的整体清扫效果。
双边刷的产品也比较多。清洁效果上按理说是增加了清扫范围。效果更好。但是存在击飞大颗粒垃圾的情况。
2018双十一扫地机器人选购攻略
其他人还看了
扫地机清洁特麻烦?我用了这款石头自清洁扫拖机器人,发现真相了
1000块钱还你一个洁净家!浦瑞克N8Plus扫拖一体机器人
智能语音交互+全屋巡视+扫拖吸烘一体机器人=科沃斯T10TURBO
石头扫拖机器人T8智能集尘版开箱评测!彻底解决经常倒垃圾的烦恼
 打赏给作者
打赏给作者
郑重声明:本文“[扫地机器人]2018双十一扫地机器人选购攻略”,https://nmgjrty.com/shenghuodq_2081.html内容,由SeanIXz提供发布,请自行判断内容优劣。
上一篇:[扫地机器人]极夜黑开箱对比评测

- 全部评论(0)

-
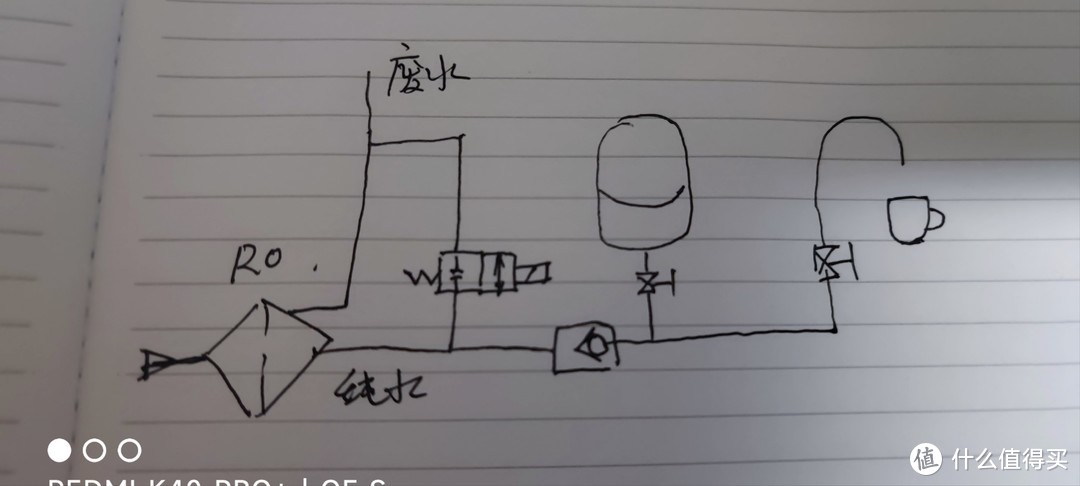 解决带压力桶RO机第一杯水TDS超标
解决带压力桶RO机第一杯水TDS超标 -
 强力清扫,杂物全无,浦瑞克N8Plus扫拖一体机器人体验
强力清扫,杂物全无,浦瑞克N8Plus扫拖一体机器人体验 - 强力清扫,杂物全无,浦瑞克N8Plus扫拖一体机器人体验
-
 洗地机到底好不好用?5分钟带你入手蓝宝电解水除菌洗地机
洗地机到底好不好用?5分钟带你入手蓝宝电解水除菌洗地机 -
 石头扫拖机器人T8智能集尘版开箱评测!彻底解决经常倒垃圾的烦恼
石头扫拖机器人T8智能集尘版开箱评测!彻底解决经常倒垃圾的烦恼 - 石头扫拖机器人T8智能集尘版开箱评测!彻底解决经常倒垃圾的烦恼
-
小米中枢网关众筹;P50-科技犬建哥
-
-
-
-
-
-
-
-
-
最新更新
推荐阅读
- [扫地机器人]iRobot770扫地机器人使用心得及深度清洁
- [扫地机器人]iRobotRoomba961智能扫地机器人
- [扫地机器人]这次的黑科技是否值得拥有?
- [扫地机器人]SWDK洒哇地咔手持无线擦地机开箱
- [扫地机器人]居家新帮手懒人好福利iRobotRoomba961扫地机器人使用评测
- [扫地机器人]iRobotRoomba961扫地机器人深度体验
- [扫地机器人]iRobotRoomba961完全评测
- [扫地机器人]拯救你的灰尘我的地宝!深度测评ECOVACS科沃斯DD35扫拖一体机器人
- [扫地机器人]谁说拖地机器人没有实用性?ECOVACS科沃斯地宝DD35扫地&拖地一体
- [扫地机器人]家电水深,有些扫地机器人买了就会后悔
- [扫地机器人]618新鲜出炉,懒人的福音,智能扫地机器人Proscenic浦桑尼克P2S版使
- [扫地机器人]Mi小米扫地机器人
猜你喜欢
- [手持式吸尘器]5个居家清洁“黑科技”,个个都能抓住痛点,用起来超顺手!
- [净水设备]滨特尔爱惠浦也可以成为家用净水器的性价比之选
- [空气净化器]铭记的新房空气质量实战规划&房型解析
- 249元,西圣xisemx1售价最亲民的骨传导耳机-科技Mentor
- 预算4K买手机,看看这四款,配置高且口碑好-觅光数码
- 生活好物用电“吉祥三宝”,高品质生活必备-科技数码好物
- 探秘816地下核工程,OPPO-iambillbil
- 随时称重!咕咚小魔兽体脂秤开箱评测分享-乐谈科技
- 220V户外便利电,aigo户外储能电源带来了什么-Geeks小树
- 热门指纹锁华为智选VOCs测评安全好用智慧满满-钥匙找锁呗
- 太大胆了,美国第一丑闻都被拍了出来!-热荐电影
- 把工作室变成游戏房,我添置了这些数码好物-波导终结者
- 迟晒的情人节礼物:菠萝君LightSaber筋膜枪-潘胖_
- 液金NO.1,硅脂也不怂!暴力熊散热硅脂简测-传说中的酱油菌小歪
- 一键解决孩子测温难题:凡米发光耳温计-BIUBIU人







